KNOWLEDGE APPLICATIONS
BASIC SCIENCE
- MATHEMATICS
- PHYSICS
- CHEMISTRY
- BASIC NATURE
- SCIENCE
- ENGINEERING
- BASE ENGINEERING
- APPLICATION BRANCHES

The fundamental subjects of mechanical engineering usually include:
- Mathematics (in particular, calculus, differential equations, and linear algebra)
- Basic physical sciences (including physics and chemistry)
- Statics and dynamics
- Strength of materials and solid mechanics
- Materials Engineering, Composites
- Thermodynamics, heat transfer, energy conversion, and HVAC
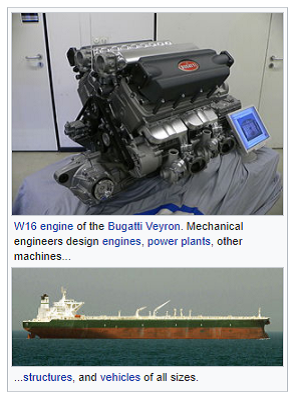
- Fuels, combustion, Internal combustion engine
- Fluid mechanics (including fluid statics and fluid dynamics)
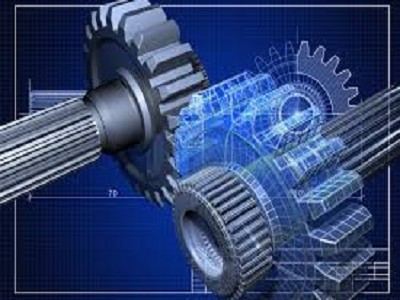
- Mechanism and Machine design (including kinematics and dynamics)
- Instrumentation and measurement
- Manufacturing engineering, technology, or processes
- Vibration, control theory and control engineering
- Hydraulics, and pneumatics
- Mechatronics, and robotics
- Engineering design and product design
- Drafting, computer-aided design (CAD) and computer-aided manufacturing (CAM)[15][16]

MECHANISM - MACHINES - EQUIPMENTS
- AGRICULTURE INDUSTRIES
- AUTOMATION INDUSTRIES
- CONSTRUCTION INDUSTRIES
- TEXTILE INDUSTRIES
- GARMENT INDUSTRIES
- MACHINE BUILDING INDUSTRIES
- BULK HANDLING INDUSTRIES
- MINERAL PROCESSING INDUSTRIES
- AUTOMOBILE INDUSTRIES
- OEM INDUSTRIES
- PRINTING INDUSTRIES
- PACKAGING INDUSTRIES
- PLASTIC INDUSTRIES
- RUBBER INDUSTRIES
- TESTING MACHINE INDUSTRIES
- SPACE INDUSTRIES
- MARINE/SHIP BUILDING INDUSTRIES
THERMAL - CHEMICAL - PROCESS
- CHEMICAL PLANT
- THERMAL PLANT
- FOOD PROCESSING INDUSTRIES
- OIL - GAS INDUSTRIES
- EFFLUENT TREATMENT INDUSTRIES
- WATER TREATMENT INDUSTRIES
- NUCLEAR EQUIPMENT INDUSTRIES
- ALLIED EQUIPMENT INDUSTRIES
Applications
While single bodies or parts of a mechanical system are studied in detail with finite element methods, the behavior of the whole multibody system is usually studied with multibody system methods within the following areas:
Aerospace engineering - helicopter, landing gears, behavior of machines under different gravity conditions
Bio mechanics
Combustion engine, gears and transmissions, chain drive, belt drive
Dynamic simulation* Vehicle simulation (vehicle dynamics, rapid prototyping of vehicles, improvement of stability, comfort optimization, improvement of efficiency, ...)
Hoist, conveyor, paper mill
Military applications
Particle simulation (granular media, sand, molecules)
Physics engine
Robotics
Concept
A body is usually considered to be a rigid or flexible part of a mechanical system (not to be confused with the human body). An example of a body is the arm of a robot, a wheel or axle in a car or the human forearm. A link is the connection of two or more bodies, or a body with the ground. The link is defined by certain (kinematical) constraints that restrict the relative motion of the bodies. Typical constraints are:
cardan joint or Universal Joint ; 4 kinematical constraints
prismatic joint; relative displacement along one axis is allowed, constrains relative rotation; implies 5 kinematical constraints
revolute joint; only one relative rotation is allowed; implies 5 kinematical constraints; see the example above
spherical joint; constrains relative displacements in one point, relative rotation is allowed; implies 3 kinematical constraints
There are two important terms in multibody systems: degree of freedom and constraint condition