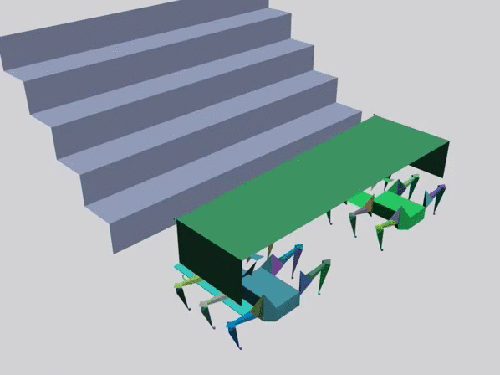
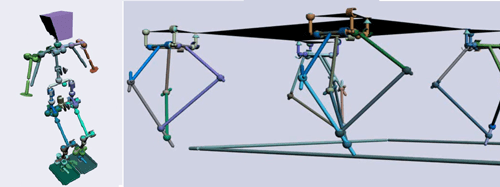
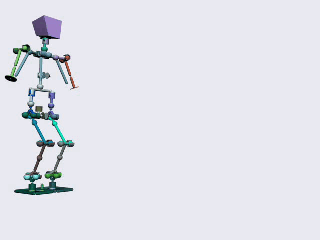
Walking Robots
Cooperation with Volgograd State Technical University and FRUND software: Inverse problem in dynamics of multibody systems applied to walking robots.
Walking Robots
Controlled mechanical systems.
Direct problem
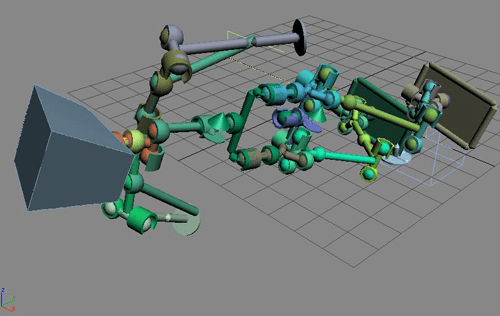
Direct problem
| Instable motion: PID control without use of computed driving forces |

| Stable motion: PID + computed driving forces |
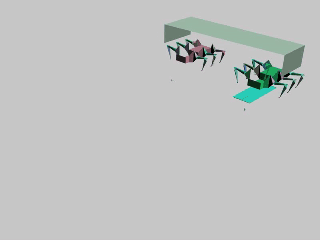
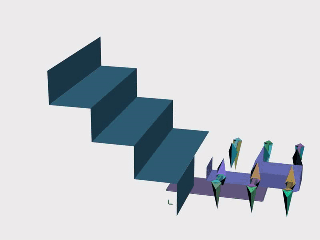
Supplement
Zoomorphic robots, group locomotion of robots.
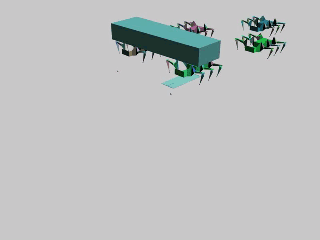
Supplement
Zoomorphic robots, group locomotion of robots.