UM Tracked Vehicle
UM Tracked Vehicle: Simulation of Tracked Vehicle Dynamics
The UM Tracked Vehicle module of UM software has been developed for an automatic generation of models of tracked vehicles and analysis of their dynamics. The following tools are available in UM Tracked Vehicle:
- automatic generation of tracks with the help of a library of basic track components,
- expansion of the library by the user,s components,
- dynamic analysis of tracked vehicles using a set of different dynamic tests.


Library of suspensions and elements of transmission
UM module for simulation of tracked vehicles includes two main parts. The first part is an automatic generator of a multibody model of tracked vehicles, and the second one generates and solves equations of motion.
The generator of tracked vehicle models includes both standard and user defined templates of
- road wheels with suspension elements,
- sprocket, - idler with tension device,
- rollers,
- track links with different type of joints,
- profiles of sprocket teeth and track link pins for precise computation of contact interactions.
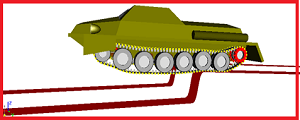
Positions of wheel centers and their radii are used for evaluation of the enveloping curve and automatic generation of track link position.
Contact Interactions
Dynamic model of a tracked vehicle includes contact interactions of several types.
Wheel-track interaction
Computation of normal contact forces between the road wheels, idler and rollers with track links is based on the following assumption: the force is proportional to the area S of penetration of a "rigid wheel rim" into the plane by vertical displacement of the wheel center δ
Sprocket-pin interaction
Contact interactions of track pins with sprocket teeth transfers traction and brake torque to the track. A compliant contact model is used. Contact forces depend on penetration of pin and tooth profiles and produce two components: the normal force N and the friction force F. The normal component is the linear function of the penetration and its time derivative.
Track link-ground forces
The known Bekker model is used for evaluation of ground-link normal forces.
Dynamic tests
Simulation of tracked vehicle dynamics in UM is based on a set of tests:
- equilibrium,
- track tension,
- tension by joint preload,
- computation of initial velocities,
- vertical harmonic loading,
- straight motion,
- open loop steering,
- test with driver.
The tests can be divided into two groups: auxiliary and main test (three last tests in the list). Auxiliary tests are used for computation of initial state of tracked vehicles and for preparing the main tests. The main tests are used for analysis of dynamic properties of tracked vehicles.
Main dynamic tests take into account ground irregularities in different forms. The figure shows an example of a straight motion test for simulation of a jump. In the case of a test with driver, a model of testing area can be used.