Universal Mechanism
A Program package "Universal Mechanism" is intended for simulation of kinematics and dynamics of planar and spatial mechanical systems
The program is oriented to practical engineers, students and teachers, in other words it is oriented to all people who are involved in problems of dynamics of machines and mechanisms. Mechanical systems are described by means of representing them as systems of rigid bodies connected by various kinematical pairs and force elements, so-called multibody systems.
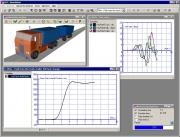
Online animation of motion and plots of dynamical performances are available during simulation. There are lots of measurable dynamical performances of mechanical systems: linear and angular coordinates, velocities and accelerations, active forces and moments, reaction forces, etc.
M has an advanced postprocessor, which includes: linear analysis, statistics, multivariant calculation and optimization and export of results. UM is a useful tool for the computer-aided modeling of multibody and hybrid systems of various types: complex aerospace structures, robots, railway vehicles, automobiles, cable systems, etc. It gives an opportunity to solve both the direct and inverse kinematic, dynamic, and control problems. There are special prices of UM for scientific and educational purposes.

UM includes kernel and number of additional task-oriented modules:
UM Automotive, UM Loco,UM Tracked Vehicle, UM CAD Interfaces, UM FEM,UM Experiments, UM Control and others.
Body properties
- Automatic calculation of inertia parameters
- Import inertia properties of bodies from Unigraphics NX, SolidWorks, Autodesk Inventor, KOMPAS-3D.
- Body of any shape
Joints and constraints
- Mass less rod
- Import of the kinematic schemes from CAD programs.
Forces
- Rotational, translation, cylindrical, gimbal, general, quaternion joints
- General, bipolar, contact, special and other forces
Graphical elements
- Import from ASC and 3DS files
- Import from Unigraphics NX, SolidWorks, Autodesk Inventor, KOMPAS-3D
- Polyhedron, ellipse, box, spiral, ellipsoid, cone, parametrical, profile
Measurable parameters
- Linear and angular coordinates, velocities and accelerations
- Active forces and moments
- Reaction forces
- Other user,s parameters
User,s modules definition
- MS Visual C++;
- Borland C++ Builder;
- Borland/Turbo Delphi;
- any program language/IDE that can output Dynamic-Linked Library (DLL) to be loaded as external libraries.
Supporting user,s modules under:
Visualization
- Trajectories
- Velocities, accelerations, forces, moments as vectors
- All measurable parameters as plots
- Control the accuracy of the simulation
- Object animation
Simulation control
- Run, pause, reset, stop the simulation any time
Import
- 3DS files - ASC files - STL, STEP/IGES files
- SolidWorks, Autodesk Inventor
and other CAD programs (graphics, inertia properties and kinematics) - Matlab/Simulink models
Export
- BMP files - Animated GIF files
- Measurable parameters to formatted text files
- Tables and graphs to MS Word and MS Excel
- AVI files
.Recommended system requirements
- Microsoft Windows 2000/XP/Vista/7
- CPU 3 GHz (multi-core CPU are recommended)
- 2 Gb RAM - 1Gb free space on HDD - up-to-date/professional video card is strongly recommended in the case of working with bodies imported from CAD or FEM software
New UM 8.3 version is now available. Revision history is in versions.txt. The list of new features in this release is given below. v. 8.3.0
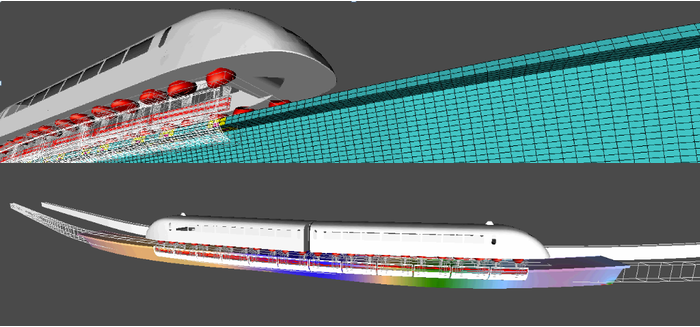
+ Wheel Profile Wear Evolution tool for predicting wear of railway wheel profiles.
+ Scanning projects now includes the following new tab sheets:
+ 3D contact options;
+ external library options;
+ FE-subsystems including VBI models;
+ monorail (MagLev) train options.
+ Added the new tool "Interpolation control" to view a variable rail profile along a track (frog, turnout).
+ Flexible monorail beam is now supported by Park Parallel solver.
* Triangulation data for graphic elements of ASC file is now saved in external binary [ascdata.ge] file.
It accelerated loading the model and made the [input.dat] file simpler.
UM includes kernel and number of additional task-oriented modules: UM Automotive, UM Loco, UM Tracked Vehicle, UM CAD Interfaces, UM FEM, UM Experiments, UM Control and others.
Our engineers can help you to carry out dynamic research of your mechanical systems.
Download the latest UM release and know more details about free trial license here.
Using UM for modeling of mechanical systems, main features of the program package, its modules and lots of animations are presented here (PowerPoint presentation, zip-archive, 83 Mb).